@JitendraMalikCV
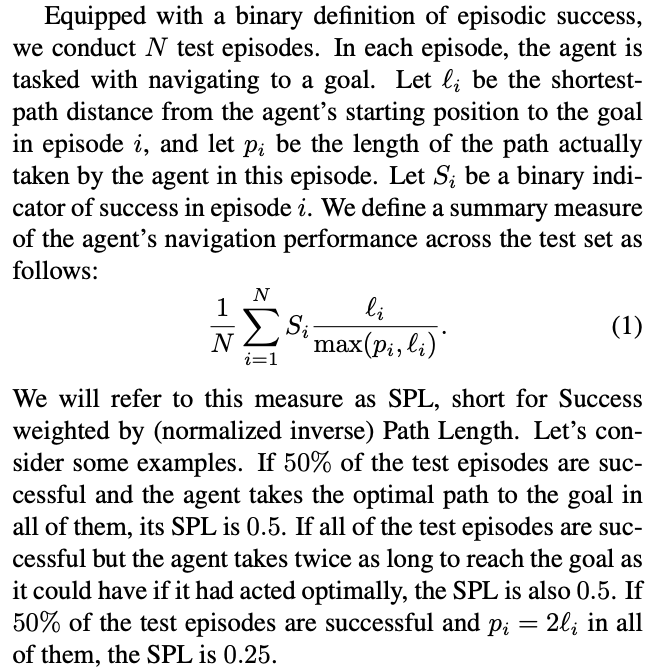
In robotics manipulation, we see many cherry picked demos but no standardized benchmarks. I suggest using STT (Success weighted by normalized inverse Task Time), analogous to SPL from navigation, replacing length by time to do task relative to a human e.g. for "Pick up anything" on random household objects. https://t.co/sVo72dagM2