@__Rhodium__
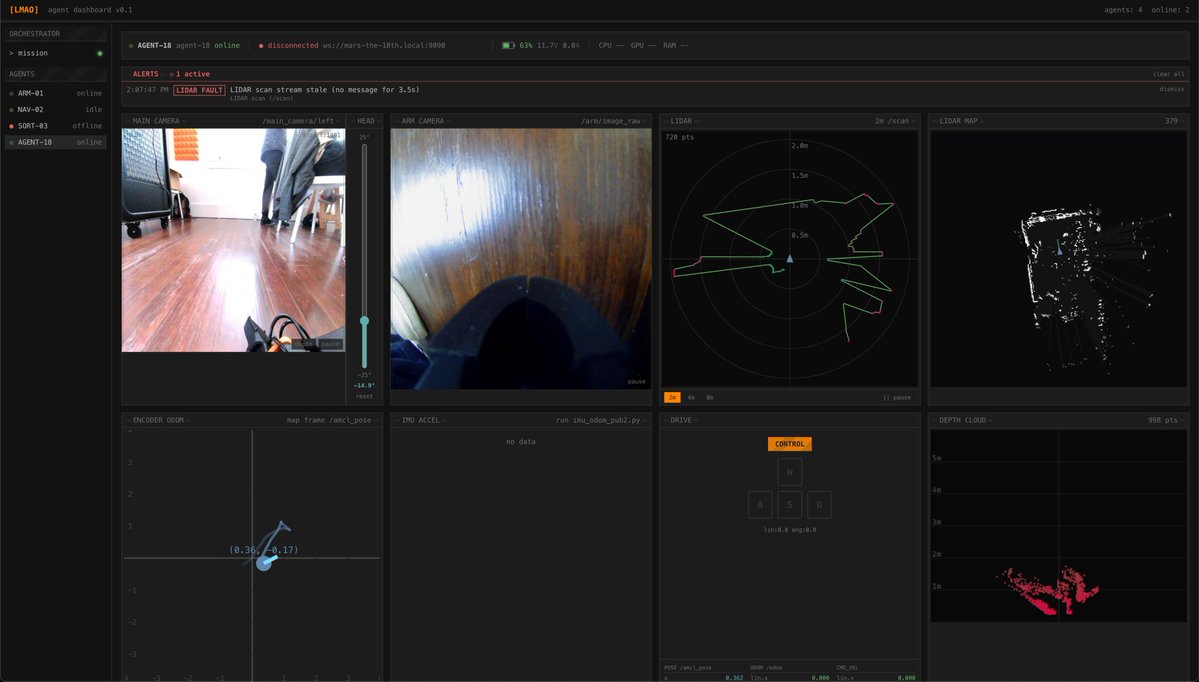
Won best edge AI at the @ycombinator and @innate_bot hackathon! We built a local VLM multi-rover orchestrator for Mars exploration. On-device navigation and automated fault detection & recovery across odometry, stereo vision, and lidar. Thanks for hosting, @ax_pey! https://t.co/GNkSNAMxRN