@askalphaxiv
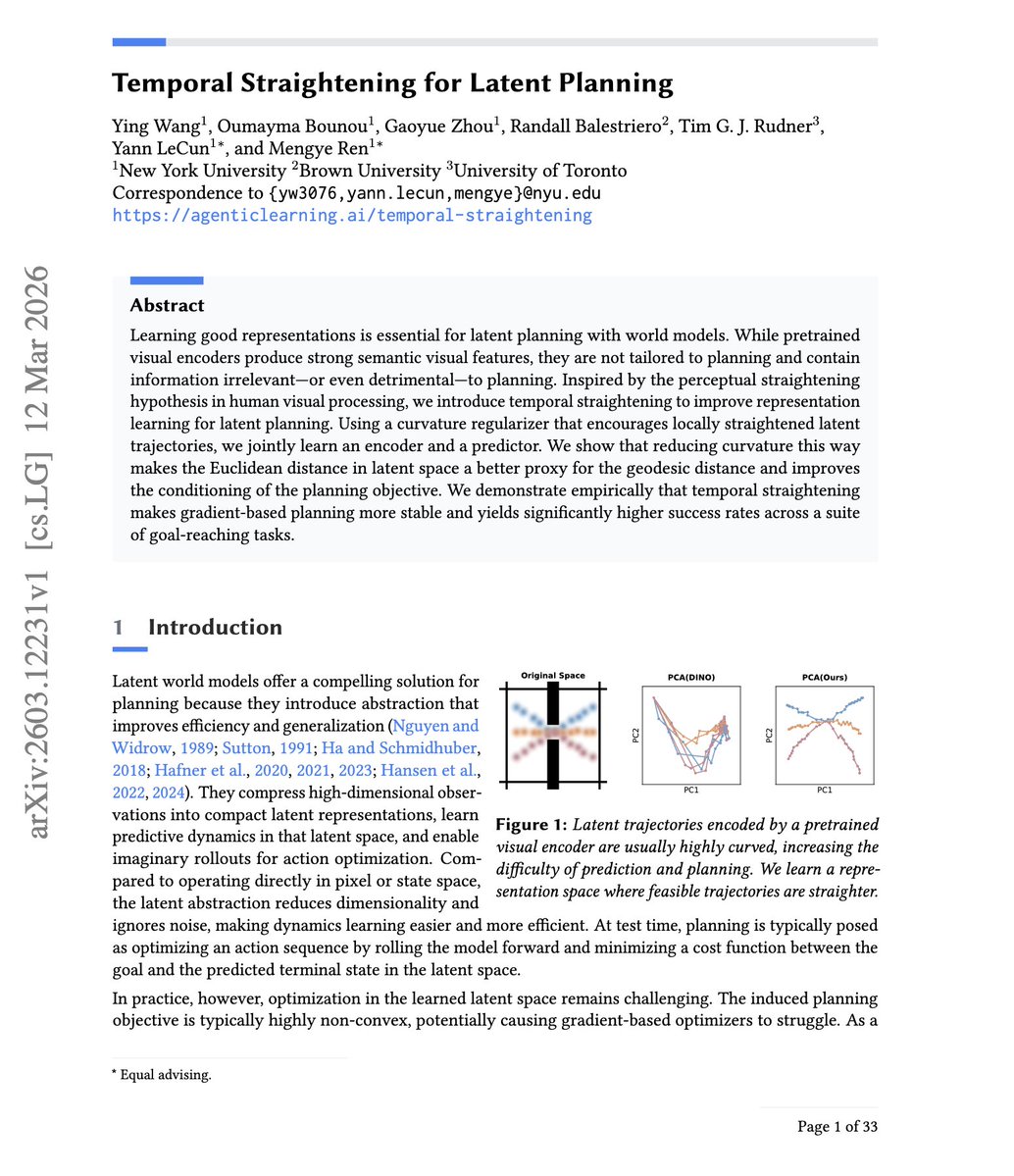
Yann LeCun is pumping out papers recently “Temporal Straightening for Latent Planning” This paper shows that by straightening latent trajectories in a world model, Euclidean distance starts to reflect true reachable progress, so it's closer to geodesic/minimum-step distance. This makes gradient-based planning far more stable and effective without relying as heavily on expensive search.